




Manipulator nga may Clamp
Pasiuna
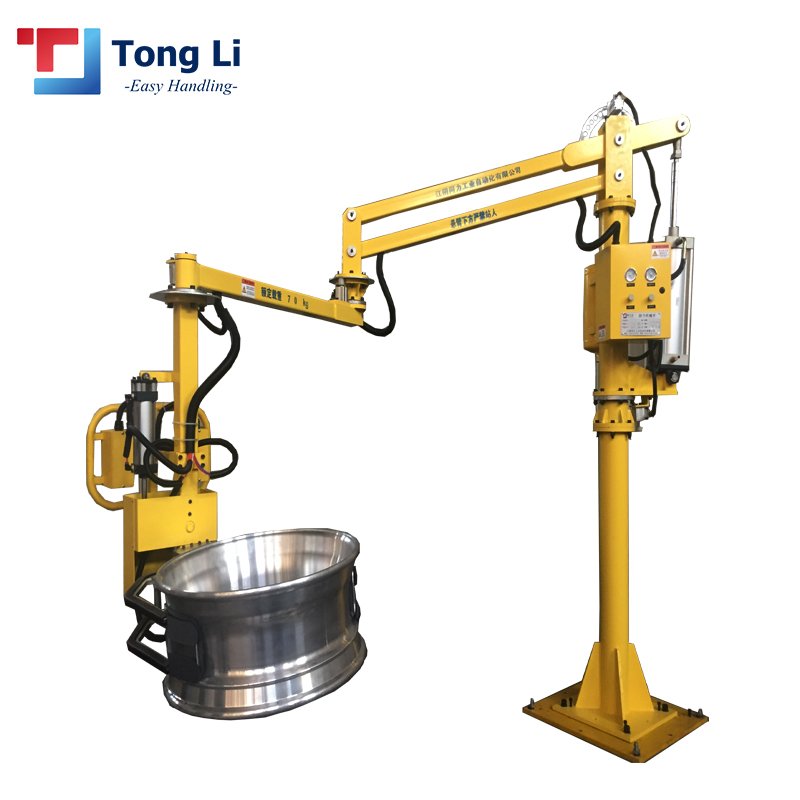
a) Ang parehas nga kusog nga hard arm assist manipulator makabalanse sa lainlaing mga gibug-aton gikan sa 2 hangtod 500kg.
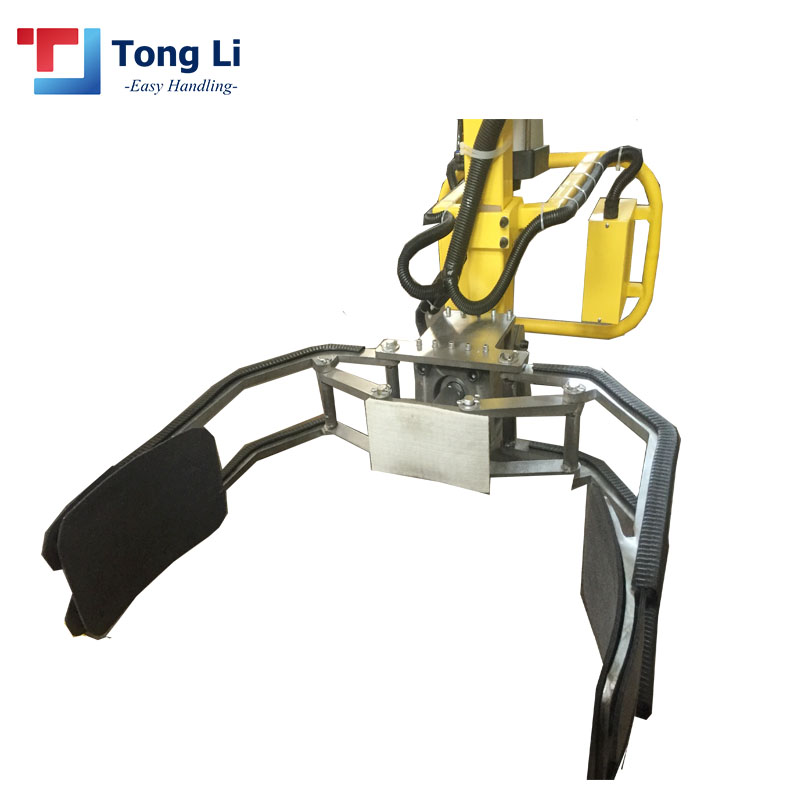
b) Ang power-assisted manipulator gilangkoban sa usa ka balance host, usa ka grasping fixture, ug usa ka instalasyon nga istruktura.
c) Ang manipulator host mao ang pangunang aparato nga nag-ila sa naglutaw nga kahimtang sa mga materyales (o mga workpiece) nga dili tungod sa grabidad sa hangin.
d) Ang manipulator mao ang aparato nga nagkontrol sa workpiece ug nagkompleto sa katugbang nga mga kinahanglanon sa pagdumala ug pag-assemble sa tiggamit.
e) Ang istruktura sa instalasyon usa ka mekanismo nga nagsuporta sa tibuok hugpong sa kagamitan sumala sa lugar nga giserbisyuhan sa tiggamit ug mga kondisyon sa site.

| Modelo sa kagamitan | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Kapasidad | 50kg | 100kg | 200kg | 300kg |
| Radius sa pagtrabaho | 2500mm | 2500mm | 2500mm | 2500mm |
| Gitas-on sa pag-alsa | 1500mm | 1500mm | 1500mm | 1500mm |
| Presyon sa hangin | 0.5-0.8Mpa | 0.5-0.8Mpa | 0.5-0.8Mpa | 0.5-0.8Mpa |
| Anggulo sa Pagtuyok A | 360° | 360° | 360° | 360° |
| Anggulo sa Pagtuyok B | 300° | 300° | 300° | 300° |
| Anggulo sa Pagtuyok C | 360° | 360° | 360° | 360° |






a) Mahimo niini nga matuman ang kahimtang sa balanse sa grabidad sa lainlaing mga materyales nga gibug-aton, nga angay alang sa tukma nga operasyon sa pagbalhin sa mga materyales.
b) Kung walay karga, bug-os nga karga ug lain-laing mga workpiece ang giproseso, ang sistema makamatikod sa pagbag-o sa gibug-aton ug makaamgo sa naglutaw nga kahimtang sa karga sa tulo-ka-dimensional nga wanang, nga kombenyente alang sa tukma nga pagposisyon.
c) Ang mga kinaiya sa hingpit nga balanse, hapsay nga paglihok, ug uban pa, nagtugot sa operator sa pagdumala, pagposisyon ug pag-assemble sa workpiece nga dali.
d) Ang gahi nga bukton makapahimo sa manipulator nga magdala sa workpiece latas sa mga babag; ang pinahigda nga bukton makatuman sa mga kinahanglanon sa pinahigda nga pagbutang ug pinahigda nga pagtangtang sa mga materyales sa mga may kalabutan nga lugar.
e) Ang sistema kanunay nga makamentinar sa lebel sa ulo sa manipulator ug makahatag og taas nga kasayon sa pagtrabaho.
f) Hiniusang preno, nga adunay daghang rotary joints aron matuman ang pagpili ug pagbutang sa materyal sa usa ka halapad nga lugar; nga adunay preno, ang operator mahimong makabalda sa paglihok sa manipulator bisan unsang orasa atol sa operasyon.



Kining klaseha sa power manipulator makaalsa hangtod sa 500Kg sa workpiece. Ang working radius mga 2500mm, ug ang lifting height mga 1500mm. Depende sa gibug-aton sa lifting workpiece, kinahanglan pilion ang pinakagamay nga klase sa makina nga nahiuyon sa pinakataas nga gibug-aton sa workpiece. Kon mogamit kita og pinakataas nga karga nga 200Kg sa manipulator aron madala ang 30Kg sa workpiece, nan ang performance sa operasyon dili gyud maayo, ug mobati nga bug-at kaayo. Ang kagamitan standard nga adunay air storage tank, nga makakompleto gihapon og action cycle kon adunay gas cut off. Sa samang higayon, kini mo-alarm aron pahinumduman ang operator. Kon ang presyur sa hangin moubos sa usa ka sukod, kini magsugod sa self-locking function aron malikayan ang pagkahulog sa workpiece. Ang manipulator nga adunay safety system, samtang giproseso ang workpiece o wala kini gibutang sa safe station, dili mapagawas sa operator ang workpiece. Uban sa lain-laing non-standard nga fixture, ang hard arm type power manipulator dali nga makakompleto sa lain-laing mga aksyon sa proseso.





